در اين پروژه براي مدل تابع تبديل كنترل كلاسيك، كنترل مدرن و كنترل بهينه در دو حالت زمان پيوسته و زمان گسسته طراحي شده است. ابتدا كنترل PID پيوسته طراحي شده و سپس PID ديجيتال و سپس رفتار سيستم نسبت به دو حالت مقايسه شده و در مرحله بعد كنترل فيدبك حالت و مشاهده گر و كنترل فيدبك با مشاهده گر طراحي شده و همچنين حالت هاي سيستم را با مشاهده گر مقايسه شده اند و تاثير نويز و تغيير پارامترها روي رفتار سيستم بررسي شده است. سپس كنترل فيدبك حالت زمان گسسته، مشاهده گر آن و كنترل فيدبك حالت زمان گسسته همراه با مشاهده گر طراحي شده اند و حالت هاي سيستم را با مشاهده گر مقايسه شده اند. اثر نويز و تغيير پارامترها را روي اين طراحي ها بررسي شده است و در آخر كنترل فيدبك حالت بهينه با تابع هزينه دلخواه طراحي شده است و رفتار سيستم با اين طراحي را در حضور نويز بررسي شده است. نتيجه اي كه گرفته ايم اين است كه كنترل PID در حذف نويز از ساير طراحي ها موفق تر بوده و كنترل فيدبك حالت نسبت به تغيير پارامترهاي سيستم مقاوم تر بوده و از نظر سرعت رسيدن به حالت مانا، SVFC سريع ترين پاسخ را داشته است.
پروژه طراحي كنترلر كلاسيك، كنترل مدرن و كنترل بهينه براي مدل تابع تبديل در حالت هاي زمان پيوسته و زمان گسسته و مقايسه آنها در محيط كد نويسي در MATLAB، مشتمل بر 57 صفحه، تايپ شده، به همراه روابط رياضي و تصاوير با فرمت pdf جهت دانلود قرار داده شده و به ترتيب زير گردآوري شده است:
- طراحي كنترل كننده PID زمان پيوسته
- ﻧﻮﺷﺘﻦ ﻣﻌﺎدﻻت ﺣﺎﻟﺖ ﺳﯿﺴﺘﻢ
- ﻃﺮاﺣﯽ ﮐﻨﺘﺮﻟﺮ PID ﺑﺎ اﺳﺘﻔﺎده از روش astrom
- نمودار هاي حوزه فركانس كنترلر طراحي شده
- ترسيم ورودي كنترلي به Plant
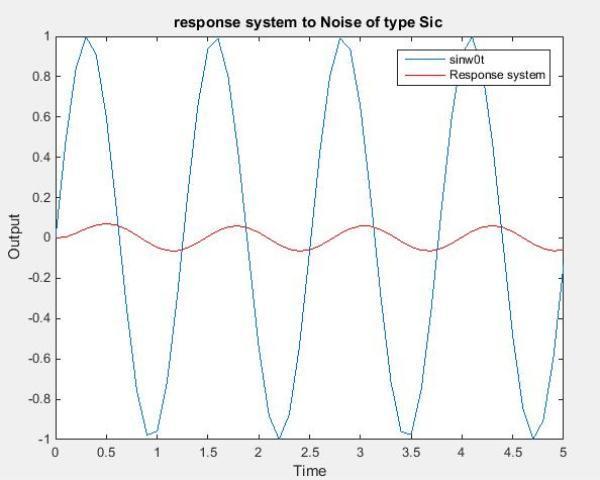
- بررسي رفتار سيستم در حضور نويز و تغيير پارامترهاي سيستم
- نويز ثابت
- نويز سينوسي
- تغيير پارامتر
- طراحي كنترلر ديجيتال PID
- طراحي كنترل كننده PID با استفاده از روش astrom
- نمودارهاي حوزه فركانس كنترل كننده طراحي شده
- ورودي كنترلي به plant
- بررسي رفتار سيستم در حضور نويز و تغيير پارامترها ي سيستم
- نويز ثابت
- نويز سينوسي
- تغيير پارامتر
- مقايسه عملكرد PID ديجيتال و PID زمان پيوسته
- كنترل فيدبك حالت و مشاهده گر
- طراحي SVFC
- طراحي مشاهده گر
- ترسيم حالت هاي سيستم و تخمين آنها
- طراحي SVFC با مشاهده گر مرتبه كامل
- بررسي رفتار سيستم با حضور نويز و تغيير پارامترهاي سيستم
- نويز ثابت
- نويز سينوسي
- تغيير پارامتر هاي سيستم
- مقايسه ورودي كنترلي SVFC با ورودي كنترليSVFC ومشاهده گر
- مقايسه SVFC با PID
- طراحي FTSC ، FTSC FTSO
- تبديل سيستم به سيستم ديجيتال و استخراج معادلات حالت آن
- طراحي FTSC
- طراحي FTSO و ترسيم حالت هاي سيستم و تخمين انها و خطاي آنها
- طراحي مشاهده گر ديجيتال و ترسيم حالت ها و تخمين ها
- ترسيم حالت هاي سيستم و تخمين آنها زمان پيوسته و زمان گسسته در يك نمودار
- طراحي FTSFTSO
- بررسي رفتار سيستم در حضور نويز
- نويز ثابت
- نويز سينوسي
- نويز سفيد
- بررسي رفتار سيستم با تغيير پارامترهاي سيستم
- بررسي ورودي كنترلي FTSC با ورودي كنترلي FTSCFTSO
- مقايسه FTSC با كنترلر PID ديجيتال طراحي شده در بخش دوم
- كنترل بهينه
- طراحي SVFC بهينه
- رفتار سيستم در حضور نويز
- مقايسه پاسخ پله سيستم با طراحي هاي LQR ،SVFC ،FTSC ،PID
- نتيجه گيري
جهت دانلود پروژه طراحي كنترلر كلاسيك، كنترل مدرن و كنترل بهينه براي مدل تابع تبديل در حالت هاي زمان پيوسته و زمان گسسته و مقايسه آنها در محيط كد نويسي نرم افزار Matlab برلينك زير كليك نماييد.
طراحي كنترل مدرن و كنترل بهينه براي مدل تابع تبديل

 روش هاي اجزاي محدود
روش هاي اجزاي محدود آموزش مقدماتي تا پيشرفته روش هاي عناصر محدود غير خطي
آموزش مقدماتي تا پيشرفته روش هاي عناصر محدود غير خطي مجموعه آموزش روش هاي اجزاي محدود مقدماتي
مجموعه آموزش روش هاي اجزاي محدود مقدماتي روش اجزاي محدود مقدماتي
روش اجزاي محدود مقدماتي برنامه المان چهار گرهي تنش مسطح و كرنش مسطح در نرم افزار MATLAB
برنامه المان چهار گرهي تنش مسطح و كرنش مسطح در نرم افزار MATLAB") طراحي قالب تزريق پلاستيك (Injection Mold Design)
طراحي قالب تزريق پلاستيك (Injection Mold Design)